This tool handles the problem of computing the motion planning of N vehicles (civil defense, ambulances, firefighters, police, etc.) when natural phenomena involving the coordination of several emergency vehicles occur (natural disasters, earthquakes, volcanic eruptions, etc.). This scenario can also be extended to wireless communication stations that needs to reach optimal points for the coverage of the territory and which continually have to move to new destinations for maintaining active communications when natural disasters that may affect the normal operation of the apparatus of traditional communication occur.
In general it is possible to synthesize the model as follows:
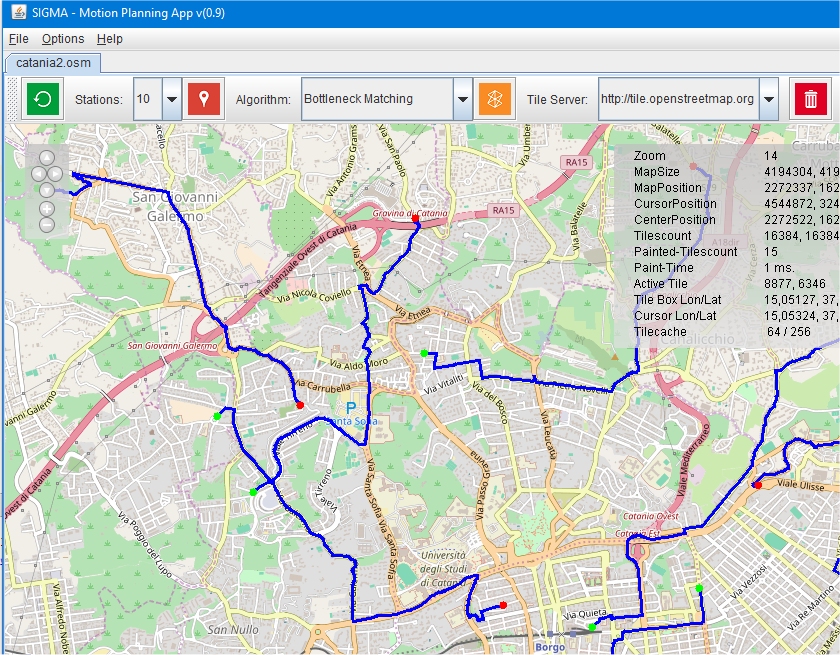
The input data consist of two sets of N geographical coordinates A and B and a road graph S, where A is the set of starting points, B the set of destinations and S the graph representation of the road system of a given metropolitan area. The purpose of the tool is to provide to decision makers a quick and efficient decision support in case of any situations of risk, associating each coordinate of departure (eg. The position of a half of civil protection), a coordinated arrival (eg. the geographical coordinate in which there was an emergency). The association between points of departure and arrival may be made so that certain conditions are met. For example, you may want to minimize the total distance traveled by N emergency vehicles to get to the points of arrival (B), starting from the coordinates specified in A. In this case we speak of Minimum Weight Matching (MWM). At other times, assuming that emergency vehicles have a similar average speed, you may want to minimize the total time for all emergency vehicles from reaching their destinations. In this case what you want to minimize is the maximum distance and we talk about Bottleneck Matching (BNM).
This tool has been developed with University of Catania in the SIGMA project PON01_00683. “SIGMA: Sistema Integrato di sensori in ambiente cloud per la Gestione Multirischio Avanzata”. Studio e progettazione di una piattaforma basata su cloud per la raccolta ed il processamento di dati provenienti da reti dense di sensori.
SIGMA Motion Planning is supported by StudioPigola on all editions of Windows 10.